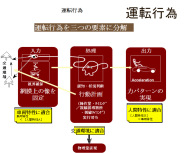
Drive by Wire(ドライブ バイ ワイヤ):
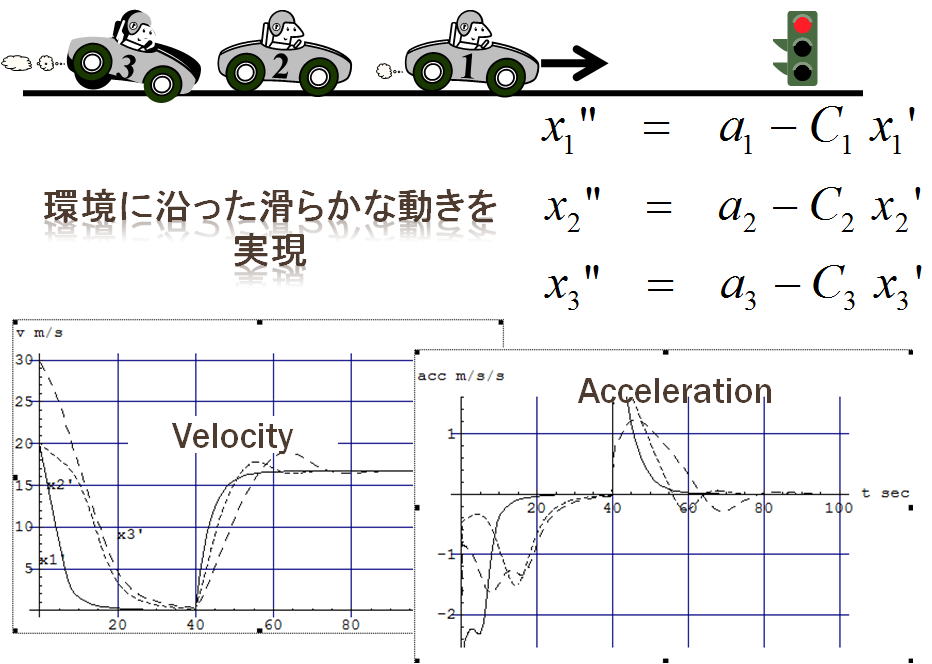
生理学上の法則であるWeber(ウェーバー)の法則に従って、操作側の特性と応答側の特性を、人にとって感覚上線形に対応させる。
右図で説明しているが、操作量と応答が線形とは、操作に対する応答が、多分加速度になるが、操作物理量のべき乗に成るべきとWeber則は言っている。
大抵は操作する手足のWeber比 Cf の方が身体を支えるWeber比 CF より小さいので、応答曲線は下に凸の関数になる。
踏力-減速度で表すブレーキの特性を例にとると、感覚上良く効くブレーキでは、下に凸の2次曲線(実際は1.?次)のような形になるべきを、一般の車のブレーキは構造上直線にしかできないので、感覚的な期待に対しては踏むほど、踏力の大きい所ほど感覚的には効かないブレーキとなる。
ブレーキの効く効かないは感覚でしかないので、実際効かないのである。 踏力の大きいところでは感覚的な期待に対しては効かないブレーキとなるので、強く効かすときはガンと踏めとなってしまう。
宇宙一良く効くと言われるポルシェのブレーキは、踏力-減速度で表すブレーキの特性は一般車と同じ直線だが、これを原点近くに急勾配で立てることによって、感覚上線形の曲線を沿わせてもこの曲線からあまり離れない形にしている。 |
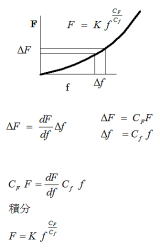
例えば、操作物理量f、系の応答物理量F、各のWeber比をCf、CF(車の場合は身体を支える筋肉の調整能力で5%前後)とすれば、線形な f と F の関係式は、操作量fの最小操作量Δfに対して、その応答量が応答量Fの最小量ΔFに成っていれば良いので、
dF/df*Δf=ΔF
これにΔf=f*Cf ΔF=F*CF を代入して積分すれば
F=K*fCF/Cf (べき乗関数) K :は定数
この関係式で操作量fと応答量Fが表せれば感覚上fとFは線形。
|

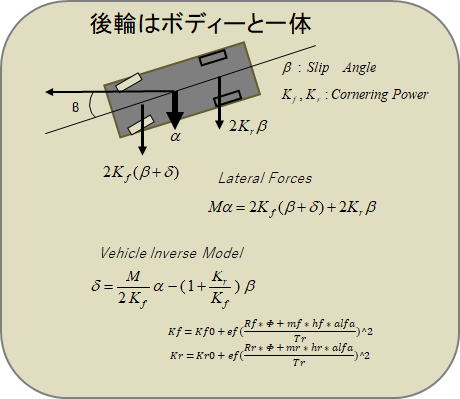 車両は CarSim(Mechanical Simulation社)
車両は CarSim(Mechanical Simulation社)