生き物は、敵から逃げる、えさを捕まえる等環境に対応して行動する。
意図が行動より先に決まっているため、手足などにどんな力を発揮したらよいかの、
筋肉などの準備が逆運動モデルで行動に先行して行われる。
行動には意図があり、結果が分かっているので、練習ができる。
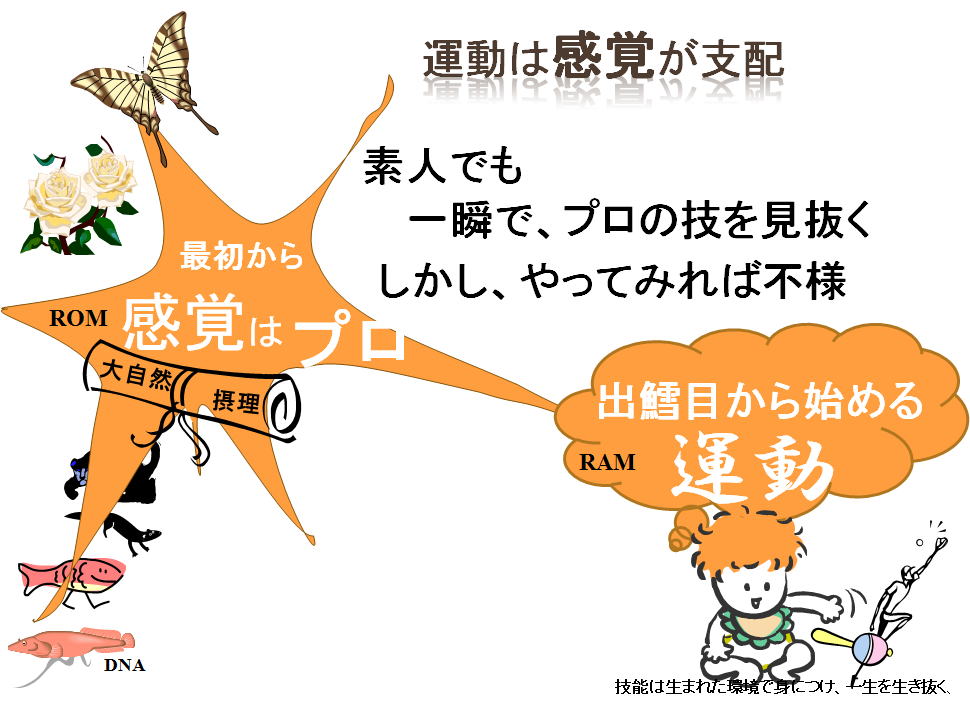
出鱈目な試行錯誤を繰り返して、より巧みな力のいれ具合を身につける。
とても乗れるとは思えない一輪車にも乗れるようになる、感
覚を頼りに。
これは生き物に与えられた巧みな上達の仕組み。
我々は、匠の物差し、美の原器を持たされて生まれてくる
鼓膜に生じた単なる機械的な振動を評価、音痴でもベートーベンが分かる
大自然の摂理が何億年にも渡って刻まれた虎の巻を授かっている
ベートーベンも最初は素人、虎の巻のコーチに見守られてトライ・アンド・エラー
何もしなければ、虎の巻は埃を被ったまま
努力(行動)すればするだけ幾らでも開示される
トライ・アンド・エラーで一生を過ごす我々は
生まれつきのギャンブラー、掛け金は”努力”
バラの花を見て美しく感じるのは、感覚の演出、
感覚が色眼鏡をかけて見ているから
美しい花は、その花のDNAが作り出す。 自然界にはそれを見る我々のDNAが共存する。
網膜に届いた光学的、物理的な、花のその光の像を美しいと感じるように生まれついている。
大自然の摂理を何億年もかけて習得したDNAが作り出すフィル
ターを通して、
無味乾燥の物理量を一瞬のうちに評価する。
そのフィルターに法則がある。 それが後述のWeberの法則。
美しい、心地よい、美味しい、・・・ 何億年もかけて蓄えた
感覚という財産を持って生まれる
感覚は生まれたときからプロ
我々の一挙手一投足を見守る神のコーチ
生き物は環境適合で進化を繰り返し、また世代を生き抜く。
環境と生き物の接点は感覚、環境は物理的な法則に支配されている、
環境に忠実、正確に対応するには、感覚も正確に物理法則に従っていなければならない。
河合寛次郎の言葉「からだの中に無数に居る未だ見ぬ形の居るからだ」
「自分は過去を無限の過去を生きて来た 自分は未来を無限の未来を見るものだ」
生涯、一陶工 河合寛次郎 1890-1965
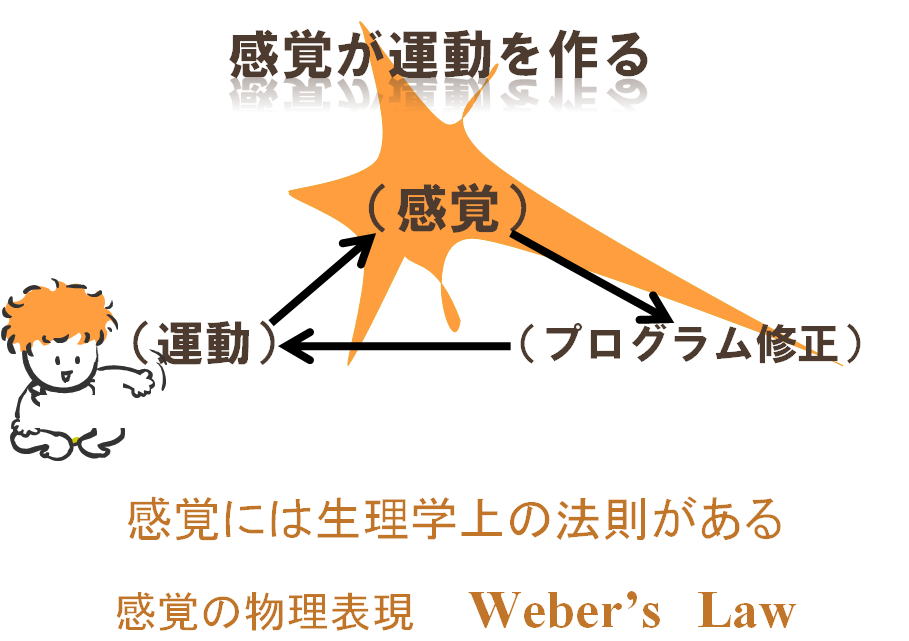
感覚から運動が
作ら れている
Motion Progress Result from Sense
Perception
生き物の運動 Bio-Motion -バイオモーション-人の運動は
見込み運動
環境が先に与えられて運動が起こるので、環境駆動の
逆運動モデルになる
|
2009年11月11日 15時10分
|
感覚が運動プログラムを修正し動作をリファイン
する
若田光一さんが宇宙から帰られて、地球ではコップが思うように持ち上げられなかったそうです。 私 たちは歯を磨くにも逆の手では難しい、すべて練習によってプログラムされて初
めて まともな行動がとれる。 生まれ落ちた環境がどんな環境であっても、例え宇宙で あっても適応していけるようになっている。 すべて生まれてからプログラムされる、赤ちゃんの行動を見ればすぐわかるように、習うより慣れろ、す
なわちどんなことでもその環境で自分でやってみて習得しなければ何も出来 ないように仕組まれ てい る。
そして、やってみれば、全知全能の神がコーチ役を引き受け、動きを見守 りプ ログラムを修正、次の機会によりリファインした動きを実現する。 コーチの正体は、自然界の美しさや、プロの技を一瞬の内に見抜く、自分自身の感覚。 トライする度に洗
練される運動は、感覚に秘められた大自然の摂理、究極の運動に限りなく近 づく。 努力して大自然に溶け込むように、感覚が導いてくれる。
この仕組みにより、何事も努力すれば神業の域に達することができる。
”為せば成る為さねば成らぬ何事も 成らぬは人の為さぬなりけ り” 上杉鷹山
ジャ
ンプ元に戻る
 単に物を持ち上げるだけの行為も綿密にプログラムされている必要がある。 スカを食うという言葉が 有りますが、単にものを持ち上げるだけでも、その物の重さ、剛
性、表 面性状など 全てが事前に分かっていなければ巧く行えない。 巧く持ち上がったかどうか、プログラムの良し悪し/出来具合は感覚によって評価される。 単に物を持ち上げるだけの行為も綿密にプログラムされている必要がある。 スカを食うという言葉が 有りますが、単にものを持ち上げるだけでも、その物の重さ、剛
性、表 面性状など 全てが事前に分かっていなければ巧く行えない。 巧く持ち上がったかどうか、プログラムの良し悪し/出来具合は感覚によって評価される。
運動は、敵から逃げたり餌をとったり命に
関わる重要な行為なので、 これに関 わる
視覚、聴覚、触覚、運動感覚、力覚などの感覚は正確に物理量と1対1に対応してい
る必要がある。
この感覚の世界を物理量の世界に変える手段は19世
紀の生理学者 Ernst Heinrich
Weber (1795 - 1878) が
物理量の式で提供してくれています。
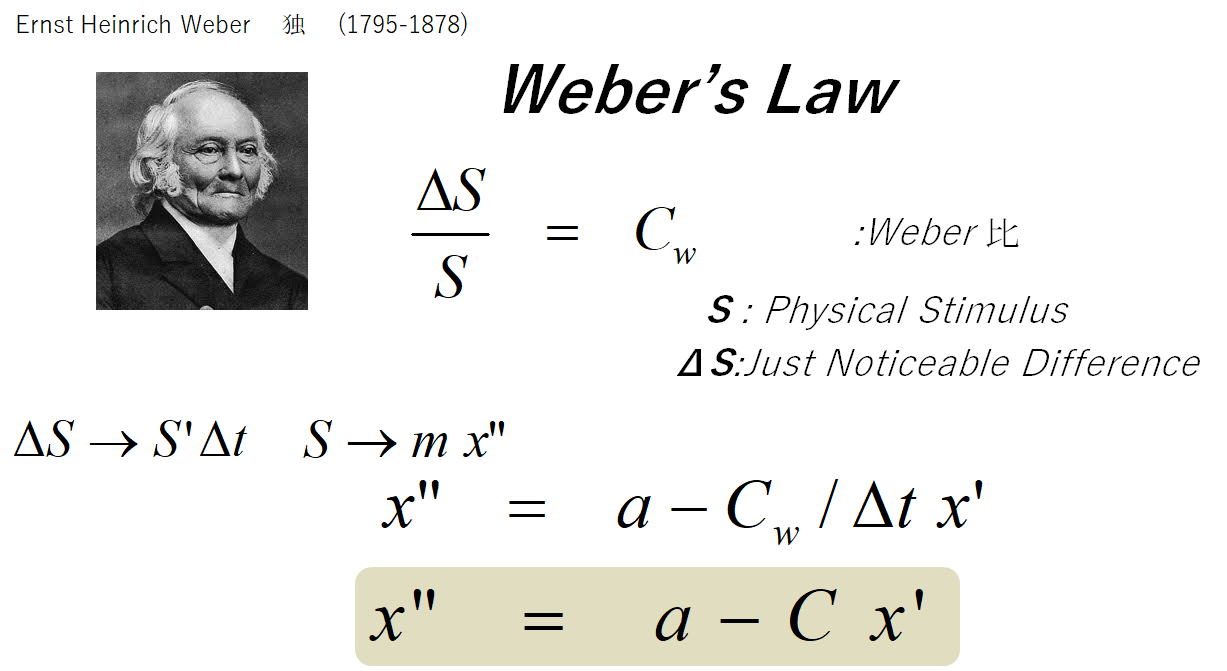
感覚と物理量との対応関係を示すWeber's Law(ウェー バーの法則)
ΔS/S=C
一定 、
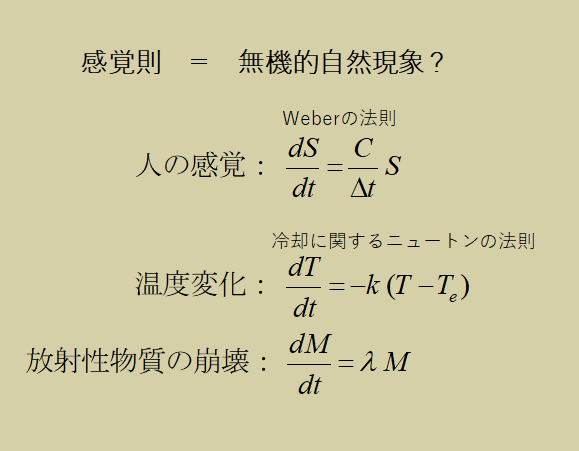
この式は感じ取れる最小の変化量 ΔS が 現在値 S に比例することを表しているが、
放射性物質の崩壊、熱せられた物体の冷却など自然界の非常に基本的な現象と同じ式の形をとる。
感覚も単純な単なる物理法則に従った自然現象としての存
在になるのでは。 |
生き物の運動/人の運動/人の制御則
バイオモーションBio-Motion:
1. 練習で身に付
けるプログラム動 作で ある
2. 練習時のコーチは神の域の名コーチ
何億年もかけて修行を積んだ、神のような
専属コーチを抱えている:DNA
3. コーチ=感覚 が運動を評価
運動-観察-プログラム修正-運動 ・ ・ ・
4. 即ち感覚から運動が作られている、そこで
5. 感覚の法則から運動を導く(右図方程式)
Weber's
Law
(ウェーバーの法則)
6. 導かれた運動は、
減衰項だけの水中をゆっくり動くもの
x"
= a - C x'
これが我々の身体
に秘められた運動の原型と思われる。
運動能力は何億 年も 前にDNAが獲得していないと今の我々はない。
陸上でこの運動を実現するのは容易で はない。
バレエ、アイススケートに限らず、その道の匠がこの水中の動きを再現すると観客
のDNAが共 鳴?。
ただこの式は、単に我々の感覚にあった(Weberの法則に適合した)滑
らかな動きを実現するだけでなく、環境駆動の逆モデルの形をしてい
て、環境に 合わせた見込み運動を行うことができる。
ページ先頭 に示すように、あ
らゆる交通環境に対して滑らかな運転が可能。 さらには、冒頭ページ、3ページ他の動
画で示されるように、車両の限界付近での安定走行を実現するステアリング操作をこ
なす。 |
物理量で定式化された
Weber(ウェーバー)の感覚法則
Weber(ウェー
バー))の法則の物理刺激量 S
として
Δ
S/S=C
一定
S として運動中の身体が受ける力(mx" )を考える。
Δ
t
を 感じる短い時間 ΔS を力の変化と すれ ば、
ΔS=dS/dt*Δt S=mx" となる。
このΔS、S を
Weber比の式 Δ S/S=C に適用すると、
身体が受ける力(mx" )の感覚が作り出す
3次の微分方程式が得られ、
これを積分して2次の微分方程式
x"
= a - C/
Δ t
x'
を得る。
感覚が目指して求める究極の運動
x"
= a - C x'
が得られる。
感覚の法則、Weberの法則から導かれたこの式 は滑
らかな運動を保証するだけでなく、さらに、予想された通り、
環境に合わせた安全速度を実現する運動の逆モ
デルと同じ式になっており、
環境(位置Xで安全速度V)に合わせた見込み運動を行う。
x"
= a - C(X,V) x'
ここに、(X,V)が環境での運動状態。
この式はこの運動状態(X,V)を滑らかに実現する。
各種用途は
こちら
Weber
Ratio C の推定例はこちら
|
水中運動:鳥羽水族館で撮影したアザラシの動き
ヒトの感性に沿った運動方程式
x" = a - C
x'
この式は、中島悟の考える人車一体の感性に沿った滑 らかな動きを実現するだけでなく、
平尾収先生の考える環境駆動の逆モデルと全く同じ形をしていて、環境に合わせた見込み
運動を行うことができる。
人は先を見込んで行動することから、人の行動を物理式で表すときの必須要件は
1 環境位置での安全速度を実現する見込み運動モデルであること
2 見込んだ運動を実現する際の、加速度の変化がヒトの感性に沿うこと
 機械的に、この方程式を、いろいろな初速度に対して解いて、横軸を時間軸、縦軸を速度軸に、重ねて描いてみると図のようになる。
機械的に、この方程式を、いろいろな初速度に対して解いて、横軸を時間軸、縦軸を速度軸に、重ねて描いてみると図のようになる。
図から、この方程式は、最初いかなる速度であっても最終的には速度が a/C に収束する運動方程式であることが分かる。 言い替えると見込んだ速度を実現することができ
る。
この方程式で運動する車両は、いかなる速度で走行していても、先を読んだ(交通環境Cが決め る)環境速度a/Cで交通環境を走り抜けることができ、しかもWeberの法則から導かれたので快適に。
すなわちこの感覚から導かれた方程式は人のように、見込んだ行動を取ることができる。
ヒトの感覚から導かれた運動方程式が、ヒトの運動である見込み運動になっていることは、運動
が感覚により作られていることを考えれば不思議ではない。
ページ先頭 の交通流のシミュレーションに示すように、この式によって走る車は、次々現れる交通環境に沿って安全で滑らかな運転で交通環境を走り抜ける。
環境駆動の具体的なモデルの形
車の質量は1トンから2トンもあ
るので、車の速度を急激に変化させることは物理的に不可能である。
速度、位置をコントロールするには、先を読んで、事前に計画的に速度を落とさなければならない。
交通環境に適合して、信号が赤に成れば滑らかに止まって信号待ちし、信号が変われば前の車には安全な車間距離をとってついて行くし、この運動方程式による車の動きは人間の
行動を忠実に再現する動きとなる。
この環境駆動の力の物理を考える。
環境力
この式による仮想的な力、環境力が車に働くと考える。
交通環境走り抜ける車に働く環境力
赤信号で車が止まるのは、車を止めるような力が信号機から車両に働いていると考える、前の車
に追いついても車間を詰めないのは前の車の存在による力を受けて近づけないと考え、これらの力
を環境力と呼ぶことにする。
車の直前に飛び出しがあれば、飛び出したものが環境力を瞬時に張ることになり、車速と飛び出
し位置によっては強力な力を受け、急制動となる。
この環境力を張って、滑らかに安全な速度を物理的に実現する力の場をつくる。
具体的には、(安全速度 V、実現位置X
)の環境に、進入してきた車両(位置x,速度x’)に働く力(加速度)
を決める関数を式(1)で表わし、 これを環境力方程式と名付ける。
x"
= a - C (x,x',X,V) x' (1)
この式は環境(速度規制、信号、障害物など)が作用して、環境に侵入する車に対し
て侵入時の走行状態(速度x'・位置x)応じて
mx" の環境力を作用させると見なすことが出来る。
安全速度V (実現位置X )の環境に速度x' 位置x
で進入してきた車両に働く加速度x"を決める関数になる。C--->
C(x,x'X,V)
目標位置Xt 目標速度Vt 現在位置x 現在速度x’
を含む具体的な環境力式
環境力方程式として完成させるには、位置の要素が必要なので、これを追
加しなければならない。
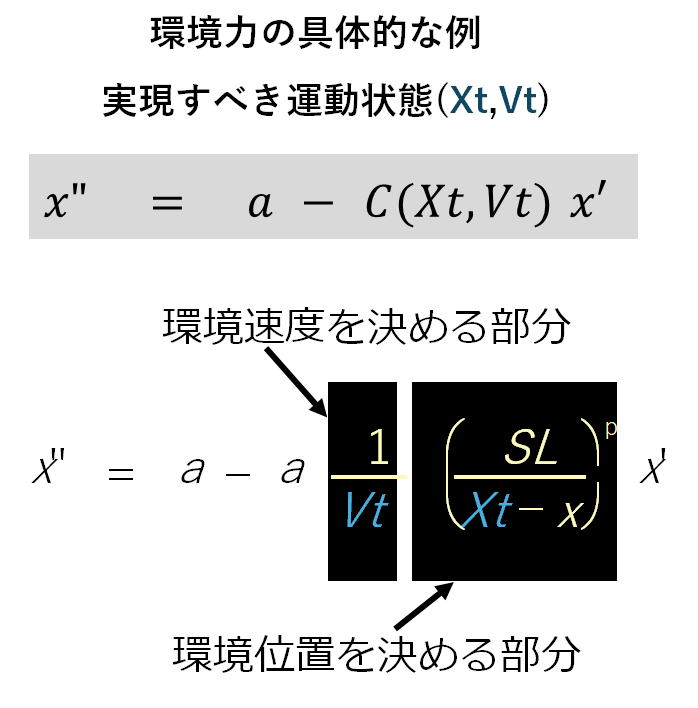 環境係数 C
を次のよう場所依存に定義することによって、速度だけでなく、
距離のp乗に反比例して環境力を発生させることができる。 環境係数 C
を次のよう場所依存に定義することによって、速度だけでなく、
距離のp乗に反比例して環境力を発生させることができる。
実現すべき運動状態(安全速度 Vt・実現位置Xt
)の環境に(速度x’ ・現在位置x )で進入してきた車両に働く力
を図のように設定する。
x" は、運動状態
の車両が環境から受ける加速度を示し、この加速度に沿って走れば、安全な運動状態
を快適に実現する。
詳
細は 発表論
文:ITS_WC_1998_3159.pdf を開く
交通環境を次々通過していく実際の運動方程式は、交通環境毎の位置と安
全速度を設定した交通環境毎に定めた上記特性式 Cn(Xt,Vt) を
加え合わせた方程式
x" = a - ( C1 + C2 + C3 + ・ ・
・ Cn ) x’
となります。
具体的な運動方程式の例で、信号機、速度規制標識、追従環境の3つ
の交通環境を、安全快適に走り抜けるシミュレーション例を示す。(計
算はMathematica)
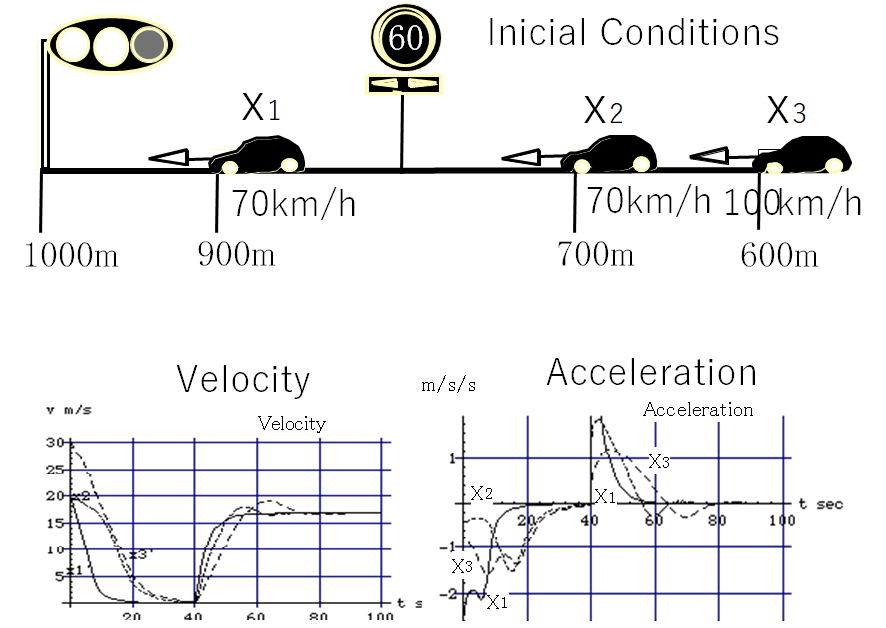
3台の車両が走り抜けるがそれぞれの運動方程式を
x"
= a1 - C1 x
x" = a2 - C2 x'
x" = a3 - C3 x'
で示す。
2番目で走る運動方程式x" = a2 - C2 x' の
具体例を下の図で示す。
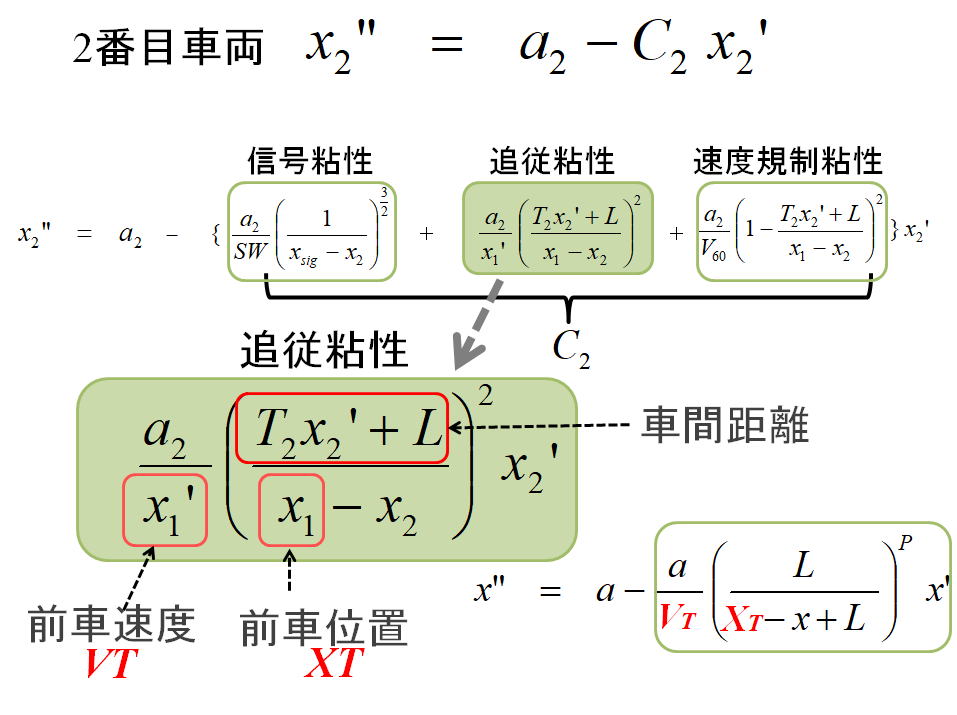 信号機交差点の環境力を信号粘性、追従
環境力を追従粘性、速度規制環境力を速度規制粘性と表現しています。
信号機交差点の環境力を信号粘性、追従
環境力を追従粘性、速度規制環境力を速度規制粘性と表現しています。
環境力はこれら3つの粘性項の和で表現する。 C1、C2、C3 の内容で異なるのは、追従粘性の項の固有車間距離の部分。
それぞれの粘性項の働きは局所的で場所依存が強くしており、その場所に近づくまではほぼ
ゼロで働かないので、
各交通環境の粘性項の和で運動方程式が作られているが、各粘性項の力が足し算されて働くこ
とはない。
例えば、信号で停止している車両が前にいれば、環境力主体は信号機からのものでなく、前車へ の追従環境力になる。
またどこでも均一に働く速度規制環境力は追従条件(自分の固有車間距離)に近づく程働か
なくなるよう工夫をしている。
鳥羽水族館で撮影したDragonFishの運動
|

