強US車運転時のハンドル捌き
Simulation of Driver/Excessive-Understeer-Vehicle
Interaction
今回
前のページ:「横方向の運転のモデル化例」で作成した運動制御方程式(運転者の脳内内部モデルを推定して作成したので、AIドライバーと表現します)を使って、ドライバーが運転している状態での車両の運動シミュレーションを行い、動的なアンダーステア特
性に付いての解析を少し行います。
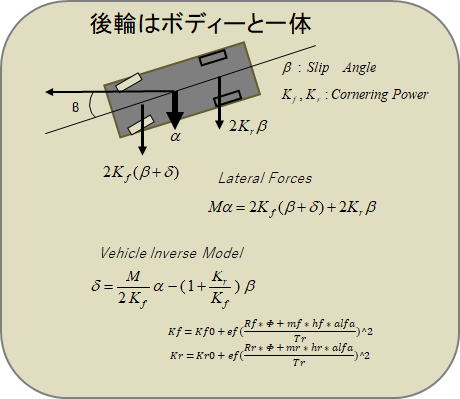
運転する車両の入出力特性式は下の図に示すとおり、教科書通りの運動方程式を当てます。
車が
行うべき運動がαで、このαを入力して出力である操舵輪の角度δを出力する。 横滑り角βはシミュレーション中の車両の走行中のデータを使用します。
アンダーステア・オーバーステアの操縦性をシミュレーションする場合、アンダーステアの強弱を決 定する旋回時の前後輪での左右荷重移動を考慮したKf、Krが非常に重要です。下記する式で算出した値を使用します。
δ = (m )/(2 K_f ) α + ( 1 + K_r/K_f
) β
コー
ナリングパワ Kf、Krは旋回外輪への荷重移動を考慮したものが必須
Kf=Kf0+εf ((Rf φ+mf hf α)/Tr
)^2 Kr=Kr0+εf ((Rr φ+mr hr α)/Tr )^2
(δ:操舵角 、m,mf,mr:質量 Kf、Kr:前後タイヤのコーナリングパワ εf
:荷重依存係数 α:横加速度 φ:ロール角
hf,hr:前後ロールセンタ高 Rf、Rr:前後ロール剛性 β:車体横滑り角
(実車から得る))
 このシンプルな車両運動逆モデルで行うハンドル捌きは、後輪が背負う車体の回転を伴うかなり込み入ったものになります。
このシンプルな車両運動逆モデルで行うハンドル捌きは、後輪が背負う車体の回転を伴うかなり込み入ったものになります。
旋回時は後輪が適切な角度取って踏ん張りますが、重い車体を背負っていて前輪のように自在に素速く所定の角度を取れません。 しかも前輪と違って自分では動けません、車体の回転頼みです。
下手な運転の車でも、走行中の運転者の意図(速度・変位)をくんで先行している加速度を計測して、この逆モデルだけで難しいス
テアアシストをすることが可能。
具体的な前輪後輪が発揮する横力の工程がどうなっているのか考えます。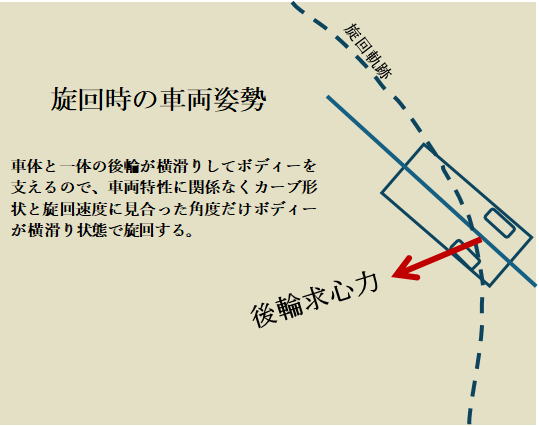
旋回時の車体を背負った後輪に発生している横力がキーになる。
左の図に左旋回中の車両の姿勢を示すが、リヤタイヤが横滑りしないと車体は支えら れないので、激しい運転でも温和しい運転でもどんな運転でも旋回中はリヤタイヤと一体の車体は必ず
図のように横滑り状態になります。
車体と一体構造のリヤタイヤが車体を支える役割を担い、フロントタイヤの役割はフロントタイヤの
力でこの車体の向きを自在にコントロールすること。
リヤタイヤは、
フロントタイヤの力によって一呼吸遅れて車体と一緒に向きを変えて、車体をささえる力を発揮し意図した旋回が成立する。
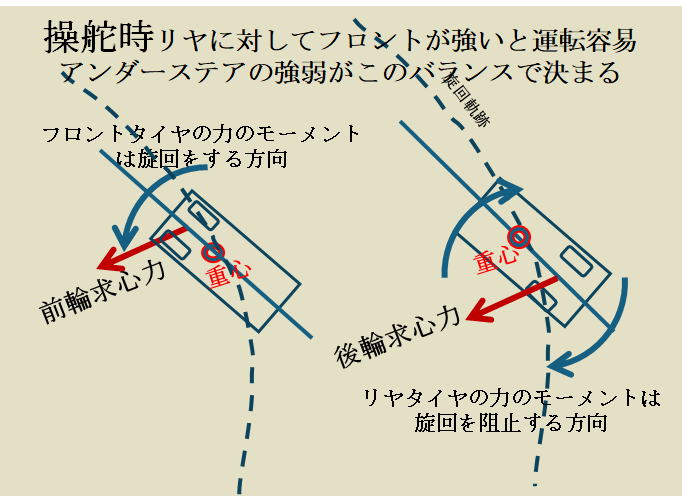
左の一番下の図に、旋回に関わるフロントとリヤのお互いにせめぎ合で働く相反する車体に働く回転モー メントを示す。
操縦性を決めるアンダーステアの強弱レベルは、車体を支えるリヤタイヤの踏ん張りモーメントと、
その踏ん張り力に逆らって車体を回転させるロントタイヤの発揮するモーメント、この二つのモーメン
トのバランスで決まります。
フロントの回転モーメントが強いほど舵が効くので自在の運転が可能で、 リヤの回転モーメントは舵とは逆方向に働く力になるので、これが強いと操舵をしても思い通り舵が切れないことになる。
しかしフロントの力で舵が決まって所定の車体の回転が得られた後は、リヤは車体を支えるので弱いと 旋回能力が落ちてしまう。 フロントとリヤのバランスの落としどころでアンダーステアのレベルが決まる。
一般的にはアンダーの強い車は急激なリバースステアのため運転が難しいのですが、なぜ難しいのかをシミュレーションで調べました。
用語について:
*アンダーステア状態 ・ オーバーステア状態
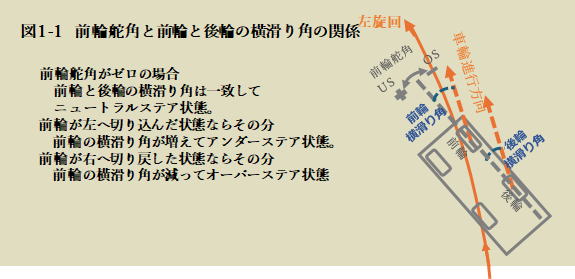
前輪の操舵方向により、アンダーステア状態/オーバース テア状態と言う表現を使うことにします。
フロントタイヤが中立より切り込んでいる時をアンダーステア状態、中立より戻している時がオーバーステア状態と表現します。
*リバースステア
車は静的にはアンダーステアに設定されるが、動的には走行状態によってオーバーステア状態にもなる。
旋回中にアンダーステア状態からオーバーステア状態に変化すること、これをリバースステアと言う。
よほどアンダーが強い車で無い限り、どんな車もリバースステアするが、アンダーステアが強いほど急激に、弱いと気がつかないくらい緩やかにリバースステアする。
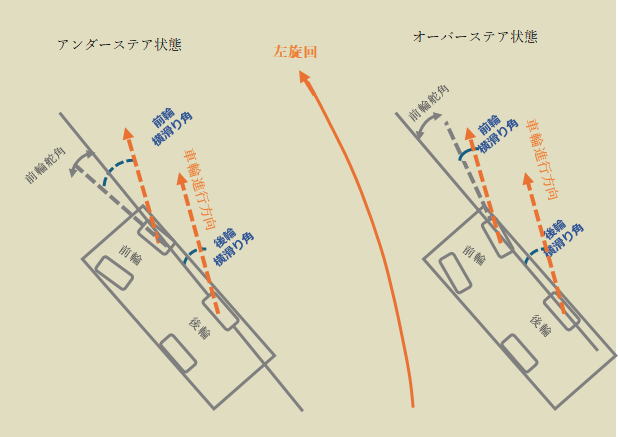
左に切り増している状態なら前輪の横滑り角は切り増し分後輪のそれより大きくアンダーステア状態、右に切
り戻している状態なら前輪の横滑り角がその分後輪の横滑り角より小さくオーバーステア状態になります。
*ニュートラルステア状態
もう一つニュートラルステエアーというのがあって、フロントタイヤが中立の状態で旋回するもので、
前輪も後輪と一緒の車体の方向を向いた状態、舵を全く切らない状態での旋回になります。
これはリヤタイヤの摩擦力に余裕がある強USのFR車でアクセルコントロールとステアリングコントロールの 合わせ技で実現します。
リ バースステア時のハンドル捌きをシミュレーション
車両はCarSim ドライバーはMATLAB/Simulink
ラリーでは難しい局面でもスピンとは無縁の横滑り自在の走り、しかしサーキットレースでは単調なコースで
プロ のレーサーが簡単にスピンしてコースアウトしているのを見受けます。
プロでも腕力不足で追いつかない強アンダー車両のハンドル捌き。
アンダーステア(US)の設定レベルがハンドル捌きにどう影響するのか、前ページで作成したAIドライバーの運転によるシミュレーション で調べてみました。
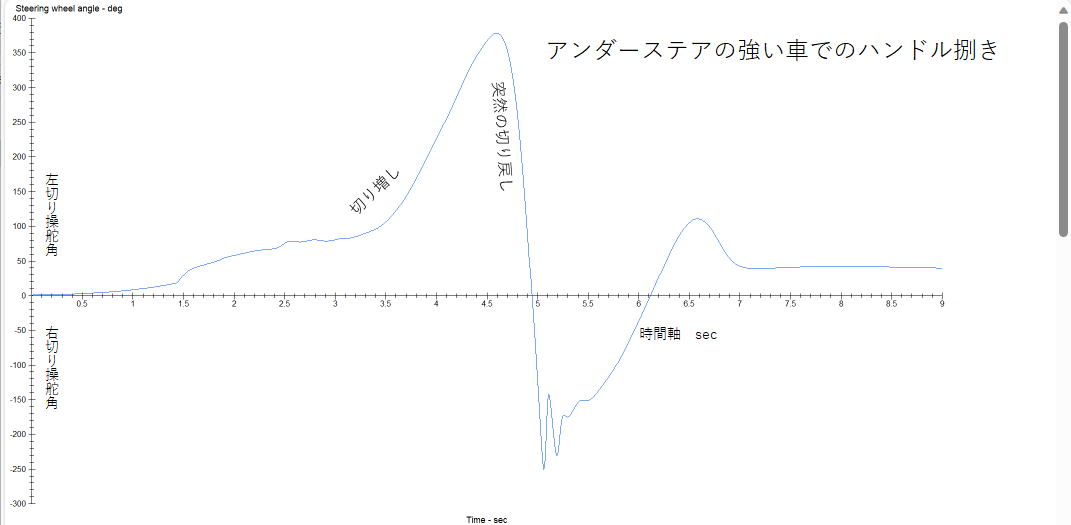
まず下のグラフで高速でカーブに進入した時の、強US車のハンドル捌きを見てみます。
縦軸は単位が”度”でハンドル切り角で、プラス側が左旋回の左切り増しの方向。 マイナス側が右方向への切り角で通称逆ハンの角度を示す。 横軸は時間で単位は秒。
カーブ進入後4.6秒位までハンドルを切り込んで、その後急激に逆ハン状態までハンドルを戻している。
カーブ進入でアンダーが出て、大きく切りましている最中に突然の急激なステアリング2回転の戻し、 ヒトの腕力を超えたハンドル捌きですが、腕力制限の無い数式ドライバーならではのハンドル捌きになりす。
ステアリング2回転近くを0.4秒位の瞬間的な速さで戻していて、ヒトで
はこれに応答遅れが重なって対応が困難で当然スピン
(今回ギヤ比18:1、10:1でも応答遅れで対応困難と思われる)。
弱US車とのハンドル捌きの違いをシミュレーションで比較
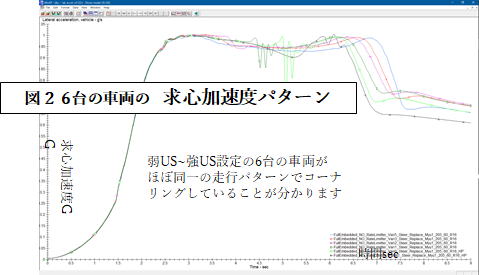
弱US車とのハンドル捌きの違いを見るため、弱USの3レベル、強USの3レベルの6段階のアンダーステ アのレベルに設定された6台の車両が、同一速度で路面ミュー1.0の大きなコーナーに進入し、摩擦限度一杯 の1G旋回した時のそれぞれの車両のハンドル捌きを、ミュレーションしました。結果を図1に示しま
す。
シミュレーション条件概要
・路面μ1.0、300Rの左カーブに旋回可能な最高速度で進入(アクセル開度一定)
・旋回時の球心加速度は全ての車両を同一のパターンで滑らかに1G旋回
・シミュレーション環境および車はCarSim(米国Mechanical Simulation
社)を使用
・運転者は擬似AI(推定内部モデル)ドライバー(MATLAB/Simulinkで作成)
結果(図1):
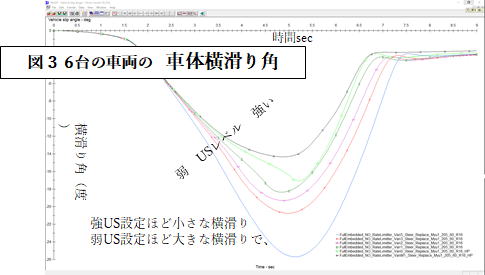
厳しいコーナリングではUS車は過度的にOSになり、弱US程穏やかにOSに移行、強USでは抵抗のすえ唐突急激にOSに移行している。
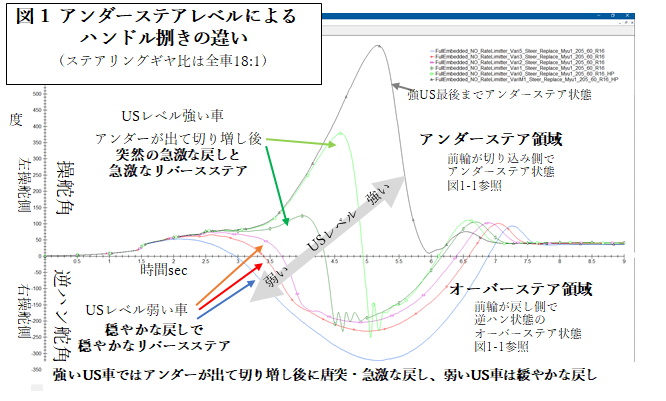
図1の説明
縦軸はステアリング操舵角、プラス方向が切り込み側操舵角、マイナス方向が逆ハン側操舵角、横軸は時間で 単位は sec。
各車両のハンドル捌きは6本の線で表示され、一番下の青の線が一番弱いUS車両の穏やかなハンドル捌 き、一番上の黒の線が一番強いUS車の急な切り増しと突然切り戻すと言う忙しいハンドル捌きが示されていま す。
最後までアンダーの1台を除いてすべての車の操舵角がアンダーステア領域からオーバーステア領域に入って いるので、一般的にUSレベルを問わずほとんどの車がリバースステアすることが分かります。
弱US設定車両3台 (青、赤、橙の線)のリバースステアは比較的ゆっくり緩やか、 USレベルがある値以上となる強US設定車両 (濃い緑、薄い緑、黒の線)ではステアリングを切り増している (通常アンダーが出ると言われる状態)時に突然で急激な戻しでリバースステアしていることが分かります。
強USの薄い緑の線の場合は、ステアリング2回転近くを0.4秒位の瞬間的な速さで戻していて、ヒトで
はこれに応答遅れが重なって対応が困難(今回ギヤ比18:1、10:1でも応答遅れで対応困難と思われ
る)。
厄介な強US特性も高速コーナーでの高速維持には必須:
FRの強US車両では特性上リヤタイヤに生じる 摩擦力の余裕分の範囲で駆動力をかけることが可能。 アクセルとステアリングによる合わせ技で、余裕分の摩擦力を使い切ってニュートラルステア状態まで持ち込めれば、ハイス ピードコーナーでの高速維持が可能となる能力を秘めています。
ポール・フレール著「ハイ スピード ドライビング」二玄社 の中でポールフレールは次のように述べている。
ステアリングとスロットルの微妙な操作によりニュートラルステア状態に達する手前で最大のコーナリング速度が実現できる。
そしてジャック・ブラバムが微妙なスロットル操作によりニュートラルステアに近い状態で4輪ドリフトしている写真(著書写真41)を掲載して、 ”これがコーナーを最も早く回るテクニックである”と記述している。
同じページに横滑り角の大きいニュートラルステアの例として写真42も掲載。
サーキットでの強US設定車の走りの実例:
後輪の摩擦力に余裕のある後輪駆動の強US設定車で、後輪に駆動力をかけて高速維持を計っている実際の場
面を見ました。
1964年5月に行われた第2回日本グランプリでホンダS800を運転するF1レーサーのロニー・バックナムが鈴鹿の第1,第2連
続コーナーをニュートラルステアの前輪はまっすぐ向けたまま、アクセルコントロールで4輪ドリフト状態で
サーカスのように毎回安定して周回していたのを今でも覚えています。
確かにアンダーステア分を駆動でタイヤの 能力を丁度使い切ればニュートラルステアになります。
今思えば、強US車の運転はこうだったのかと腑に落ちま した。
図2に6台の車両が同一の走りであることを示す求心加速度の時間的変化を示します。
図3に6台の車両の車体の横滑り角の時間的変化を示します。
以上ですが、これはあくまでもシミュレーションの単なる1例で実車での計測ではありません。 ご参考にし
ていただければと思います。
実車での経験でも、弱US車はリバースするもリバースしていることを意識しないで容易に運転できること、
また通常アンダーが出ると言われるほどの強
US車では一寸した油断でステアリング操作が間に合わずスピンに至ってしまうことなど、このシミュレーションの
結果は実車での運転経験に矛盾しない納得できるものと思われ、当たらずといえども遠からずではないかと思っ
ています。
サーキットでのレーシング仕様のレーシングカーが、プロの運転でもスピンするわけで、アンダーが出て危険な状態でリバースするまで市販車両を運転を仕切ることは非常に 困難です。 強US車両のハンドル捌きはシミュレーションに頼るしかありません。
図1の赤色の線の弱US車両の穏やかなステアリング操作の例の動画(シミュレーション動画は
CarSim)
図1の薄緑色の線の強US車両のステアリングの急激な切り増しと戻し例の動画(シミュレーション動
画はCarSim)
ステアリング操作速度に制限を設けた戻しが間に合わない場合の車両挙動(シミュレーション動画は
CarSim)
AI
ドライバーによるシミュレーションで分かったことは、余程の強いアンダーステアで無い限り、アンダーステアの強弱に関わらずリバースステアは必ず起こると言うことです。
アンダーが弱い車両の場合はラリー車のようにコーナー進入初期から穏やかに
リバースし、その為一寸練習すれば 比較的容易に対応可能でスピンはしません。
強アンダーに恐怖を感じているなら、サスペンションに手を入れて、アンダー を弱めに修正すれば限界まで攻めてもスピンとは無縁で居られる。
アブソーバーによる、前後でのロール剛性配分の変更効果、変更前後でのハンドル捌きの違いのシミュレーション例
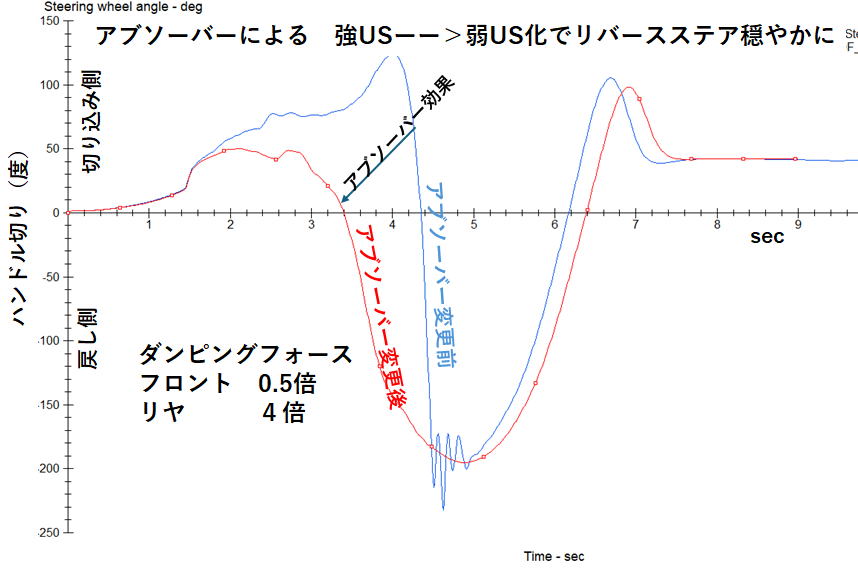
私の場合フロントスタビ強すぎの強アンダーのエアサスのマジェスタに乗っていますが、減衰力が 9段階のコンピュータ制御アブソーバーを手動にして、
フロント1段目、リヤ5段 目に固定ですぐリバースするようになり、いきなりのリバースとは無縁で、 安心して快適なコーナリングを楽しんでいます。
ストロークしないと効かないばねと違って、変化速度で効くアブソーバで合わせると、タイミングも早まりより穏やかなリ バースになり、 またロールし終わるとアンダーに戻ってグリップ感が出るのでオンザレール感があり、ばねだけで合わせるより運転はさらに容易になる。
ただし欠点として滑りやすい路面ではアブソーバーの 影響が小さくなり、 強USが出てきてしまう。
もう一度強US車のシミュレーション例を見てみましょう。
強US:Excessive Understeer車
の運転例 追加説明
CarSim動
画で 見てみましょう
|
強US車のカーブ進入例
最初の3つは弘法の運転で,4つ目は制限をか けられた弘法の運転例
・リバースステエア時のステアリング戻し操舵例と、
・同じ車で最後までアンダーが出て前輪滑りが続いた後のステアリング戻し操舵例。
・さらには、リバースした後のリバースステアからの戻し操舵の例。
・最後の例は、操舵速度を少し制限されてた弘法の運転、一般的なドライバの運転何回かの修正操舵後に最終的にスピンに至っている。
修正操舵の速度が遅いので、遅れた分必要な逆ハンの量が大きくなる、そうすると今度はこの大きく戻したところから
逆に 戻すことになってしまうが、如何せん操舵速度が遅いのでさらに遅れると言う最悪の循環に入る。
強US車両のリバースステア時の急速な大きな戻し操舵例:
CarSim(Mechanical Simulation社)
|
上と全く同じ車両でリバースせず強USのまま切り込んだ場合の急速
な大 きな戻し操舵例: CarSim
|
強US車のリバース後の急激な戻し操舵例: CarSim
|
ステアリングギヤ比の大きな強US車両は上手なドライバでもスピン
は免 れない: CarSim
ステアリングギヤ比18、弘法の運転だがステアリング最大操舵速度1000度/秒に制限
---CPU能力でギクシャクする場合は他の動画を止めてみてください---
|
|

