弱US(弱アンダーステア)車は限界時の挙動が安定していて運転し易い。
|
|
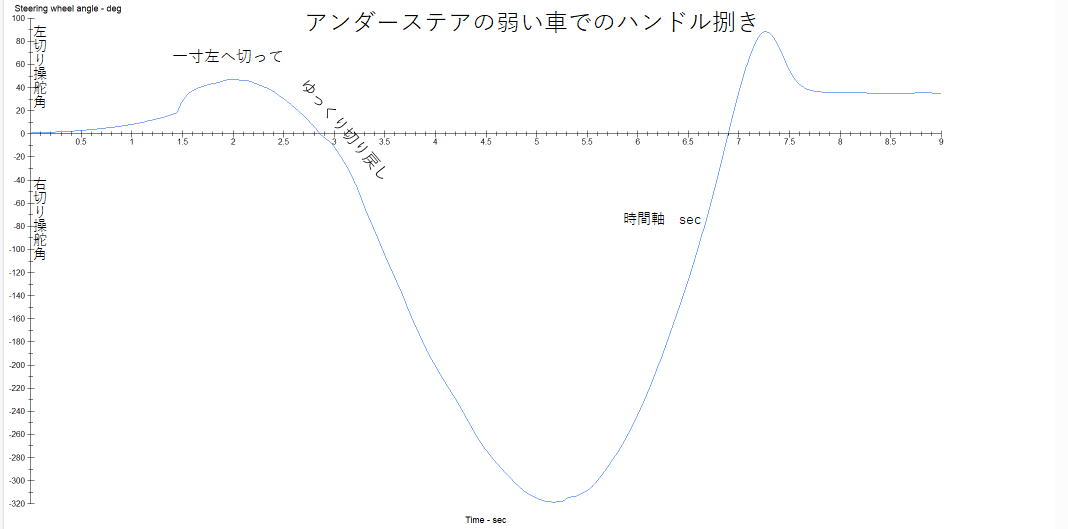
下のアニメーションとグラフから分かるように、限界速度で左カーブに進入した場合のリバースステア時、 修正操舵(逆ハン)は滑り出し直後からゆっくり始まり、ゆっくり戻る。
(車両はCarSim、ドライバーはMATLAB/Simulink)
強US車の場合は旋回中の頑張っている時のいきなりのリバースステアで急激な修正操舵が要求されるが、
弱US車のリバースステア時では、修正は滑り始めたらすぐ戻すと言う普通の感覚で、
しかもゆっくりなので少し慣れれば、弱US(弱いアンダーステア)車両で横滑りしても運転に失敗することはない(このページの最後にベンツの例)。
下のグラフは、弱US車が時速215kmで300Rの左カーブに進入した時のステアリング操舵角の時間変化を示す。 横軸は時間(sec)、縦軸は切り角(度)。
弱US車と強US車の限界時のハンドル捌きの違いを見ます
USレベルの違いによって操舵特性が大きく変わる強US車と違って、弱USの場合USのレベルが変わっても操舵特性が殆ど変わらず、弱US車なら他人の車でも普通に運転出来る。次のハンドル捌きの違いのグラフで見て頂きます。
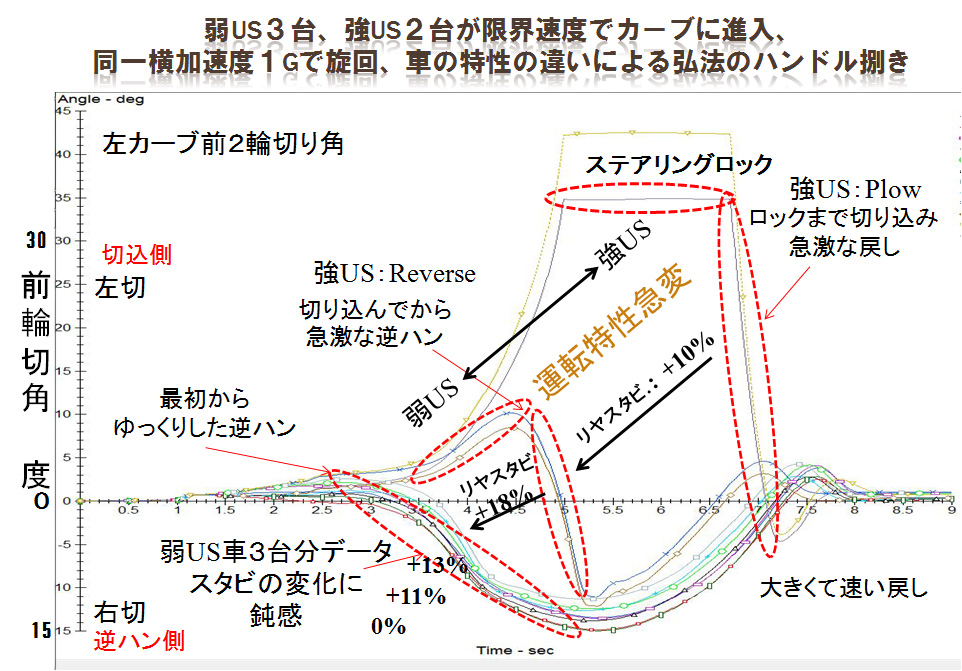
車両3台、強US車両2台の計5台分の車両の前輪の切り角を表している。
リヤのスタビライザーの強さを10%くらいづつ増加させてUSのレベルを弱くしている。
USが強くなると切り角を戻すときの勾配がきつくなっている。
戻すタイミングが遅い上、切り増して居る最中に突然の素早い大きな戻し。
USが弱くなると切り角の勾配が緩くなっている。
戻すタイミングが早く、ステアリングを切ったらすぐゆっくり戻している。
さらには、リヤスタビの強さが約10%づつ変わっている弱US車両3台のグラフh重なっており、USがある程度弱い状態では、リヤスタビの強さが変わっても、ステアリングの操作特性の変化が少ない。
すなわち、弱USに設定されている車は、強USに設定されている車に比べて、積み荷、タイヤなどの変化に対して運動特性が安定していて、 しかもゆっくりなハンドル操作で横滑りがコントロールできる。
前のページでも示すように強US(強いアンダーステア)車は挙動が不安定。
下図2枚を見比べながらその運転を見ると、強US車では横滑りが始まってもアンダー状態で切り増しの方向で未だ戻さない、その後しばらくして急激な修正操舵に入る。
運転を難しくしている原因の第一は修正操舵のタイミングがつかみにくい、そして第二には、非常に大きくて急速な修正操舵を要すること。
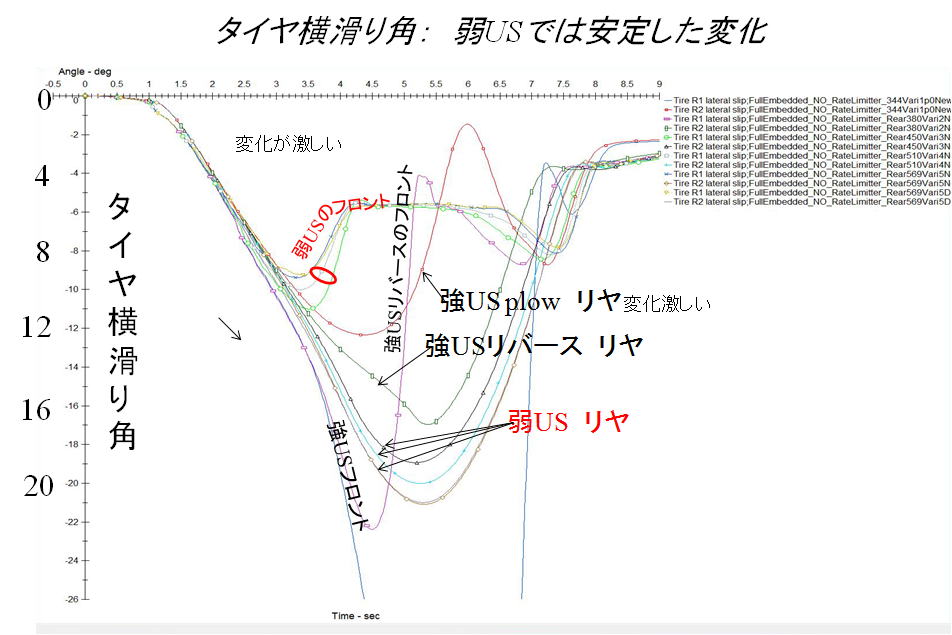
上のグラフはステアリングの切り具合を示したものだったが、下のグラフはそのときの前輪及び後輪の横滑り角の変化を示す。
カーブ旋回中の弱US車両では、フロントおよびリヤともにタイヤの横滑り角が安定して緩やかに変化しているのに対して、 強US車両ではリバース時はフロントの横滑り角が急変、Plow時はリヤの横滑角が急変している。
強US車のフロントとリヤの横滑り角の交点がリバース点。 弱US車の横滑り角のデータが重なっていて、このグラフではリバース点が分からないが2.5秒前後のところでリバースしている。
|
なお、車両は、ばね及びアブソーバの特性を設定できる米国Mechanical Simulation社のCarSimで、今回はスタビライザーの設定を変更することによって、前後のロール剛性配分を変えてアンダーステアのレベルを調整した。
弱US(弱いアンダーステア)車の運転(215km/hで300Rに進入):
素直な前輪の動きに注目、 滑り初めから素直にステアリングを切り戻せば良いことを示している
しかし、弱US車は滑りやすく走行抵抗が大きくなりがちで旋回速度が低い。
運転がし易く突っ込んでも大丈夫と言っても、カーブを短時間で抜けるにはなるべく滑らさないのがコツ。
進入速度が速すぎると、全く同じ車でもこんなに差が。
|
車両はCarSim(Mechanical Simulation社)
参考:
(最近のFRはオーバーステア時の運転が容易で、サスペンションは強いアンダーステア側にはセットされていないと注釈あり)
This is a file from the Wikimedia Commons. File:Mercedes AMG CLS 55 - Demonstration of drifting 1b.jpg. From Wikipedia,
the free encyclopedia Author: Raimond Spekking/Wikipedia.
Contrary to popular opinion, modern rear-wheel-drive cars are much more user-friendly in regard to oversteer. Their suspension is not balanced heavily toward understeer,...
スイフトに乗っていますが、この車のアンダーステアのレベルは、写真のベンツに代表されるように、誰でも限界まで走りきれる弱い設定になっているようで、日本車では珍しいと思います。
一般的には、乗りやすくするにはリヤのアブソーバを少し高めに設定することです。
リヤの縮み側の減衰力を上げた場合の操舵角変化を上の逆ハンの前輪切れ角のグラフ上に重ねて表示すると、 どの場合も表示よりさらに下側に移り穏やかな逆ハンの操舵角変化となる。
強US車でアブソーバーの減衰力を変更した場合のハンドル捌きのシミュレーション例を4ページに示す。

|

{kind=link}