| 車の運 転とDriver Model | 力の場の 方程式 自動運転 | 横方向の 運転のモデル | リバース ステア 強US車両の挙動 | 弱US車 両の挙動 | バイモ研 | 運転行為 /Weber則関連 | 車の運転 の物理 | Bio-Motion Equation の環境対応、具体的なパラメータ例 | Human-Motion Control Model Skilled | 逆モデ ルによるドライバーモデル |
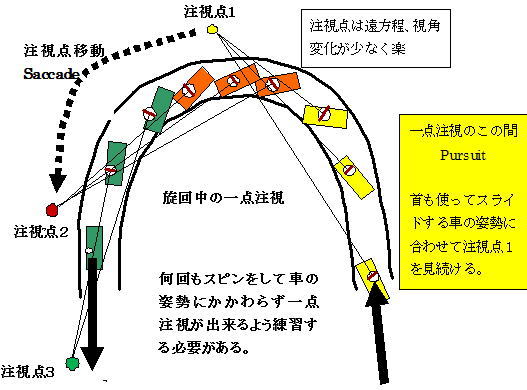
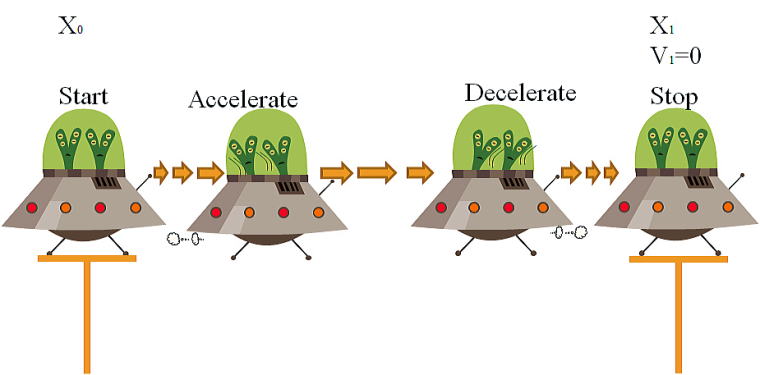
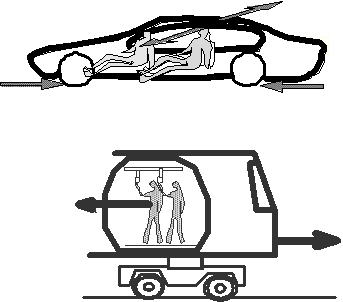
頭部と眼球を動かして網膜に前方環境の像を固定出来るとは、 例えて言うと、揺れる車の中でビデオカメラを構えて、身体とカメラを支える腕で車の揺れに合わせて、 バランスを取ってビデオカメラのビューファインダーに写る像が、車の揺れにも関わらず静止した状態に保って おけると言うことです。 車の揺れに合わせてビデオカメラの方向を正確に前方の一点にいつも向けておかなければならないわけです。 限界付近の速度でカーブに進入して、横滑り状態でも思った様に車が横になって旋回できたときは、 旋回中の視界が非常に安定していて、巧く旋回できなかったときは画面が揺れて安定しなかったことを経験され ている方もみえると思います。 練習によって車の旋回時の姿勢を身体が習得していれば、一点注視が巧く行き、 非常に安定した視界の中で運転を続けることが出来るわけです。 スピンまで行かないところまでの練習が必要となる。 ただしアンダーステアがあるレベル以上に強い車の場合は、ヒトの腕力を超えたハンドリングが必要で、 練習してもスピンは防げない事になるので、ハンドリングの習得が出来ない事になる。 最も基本的で大切な車の性能は、走行中ににピッチングが起こらないことです。 ピッチングが起こる車は、 何もしないで真っ直ぐ走っているだけでも、視界を安定させるのに常に眼球・頭が動くことになり、最低の車と 言うことになります。 ② 感覚の法則:Weberの法則から導かれる生理的に快適な運動α
|
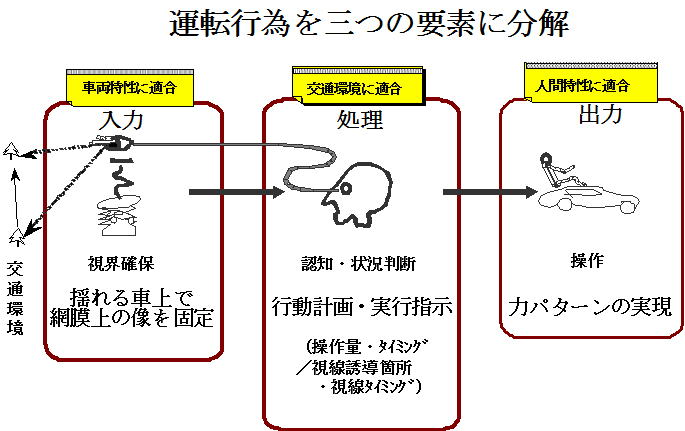
運 転行為の分解: 車 両特性に適合 交通環境に適 合 人間特性に適合 |
 |
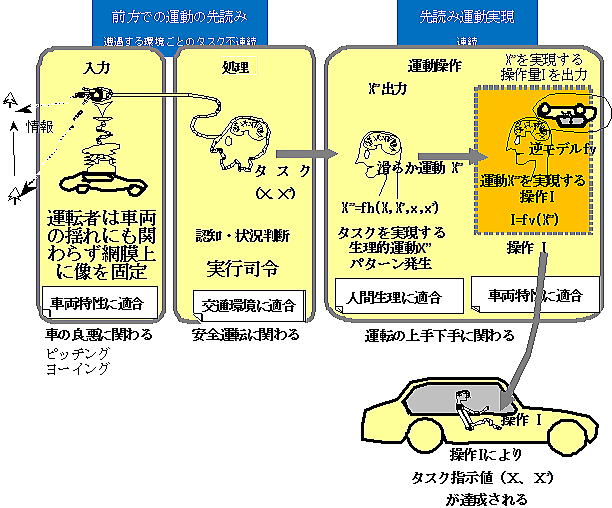
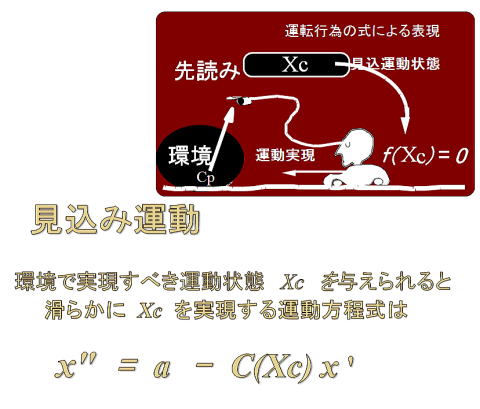
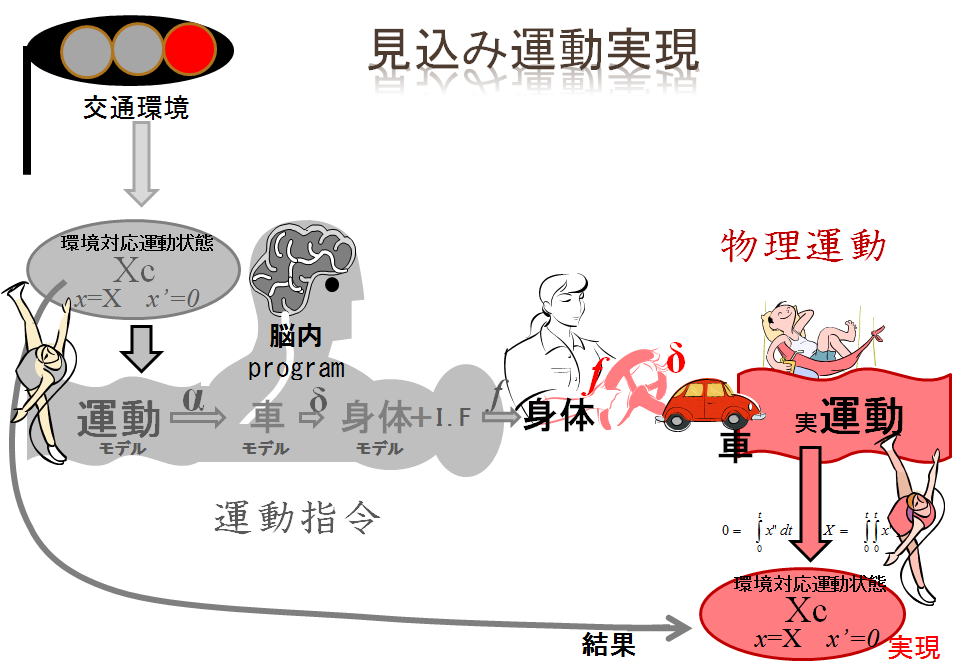
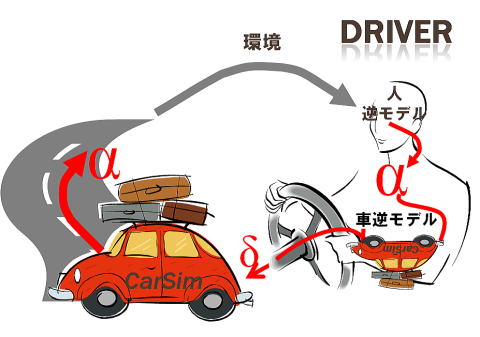
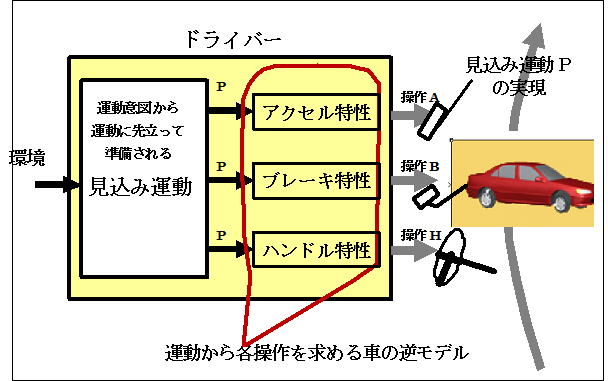
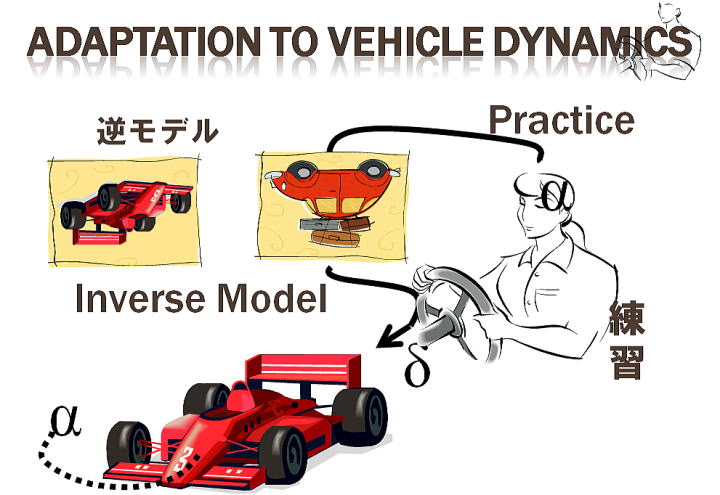
運 転意図の実現 : 練習により車両ダイナミックスを身体に取り込む運動意図を、車の運動として実現するためには、運転者は車はどう操作したらどう動くのか良く知っている必要がある。 運動を実現する操作を得る車両逆モデルが、運転練習により身体の中に作られていないと巧く運転できない。 運転するには誰でも身体内に車両の逆モデルを作らなければ ならないので、車の特性が人にとってシンプルに作られている程、その車は巧く運転できることになる。 ロールアンダーとかブレーキのビルドアップとかの小細工がしてあると、思い通りの滑らかな運転には都合が悪いことにな る。 色々な良いと思われる細かいことが組み込まれた車は、運転者がこの逆モデルを巧く作れないので、そんな車を思い通り動 かすことは難しい。 |
 |
| 快
適な加速度コントロールができるには: 操作系が巧く出来ていると言う前提。 予定した車両加速度を生じるのに必要な操作が逆モデルから正確に導かれても、最終的にはアクセル、ブレーキ、ステ アリングの操作入力が常識的な範囲に収まっていて、人の感覚生理に合っていないと操作自身が不正確になってしまって 予定した適切な加速度が生じない。 操縦系インターフェースの項参照。 |
 |
| 車 の運転とDriver Model | 力 の場の方程式 自動運転 | 横 方向の運転のモデル | リ バースステア 強US車両の挙動 | 弱 US車両の挙動 | バ イモ研 | 運 転行為/Weber則関連 | 車 の運転の物理 | Bio-Motion Equation の環境対応、具体的なパラメータ例 | Human-Motion Control Model Skilled | 逆 モデルによるドライバーモデル |
 |