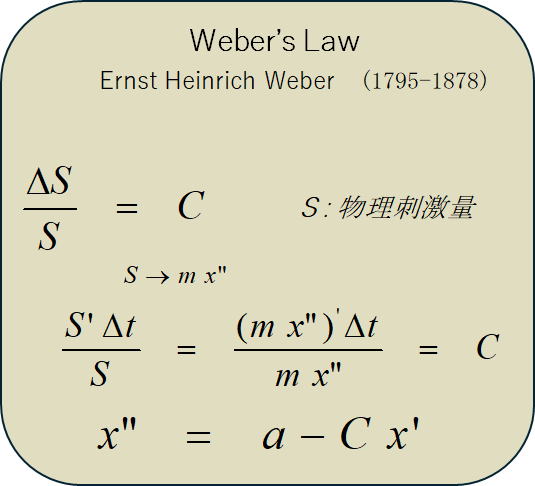
変形すると、

この直線と、車両位置(x、
y)の距離Sは、
変
形して符号を変えて(このままでは原点(0.0)
側の距離Sが
負になっているので)、

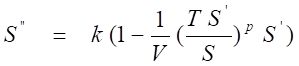
S’は


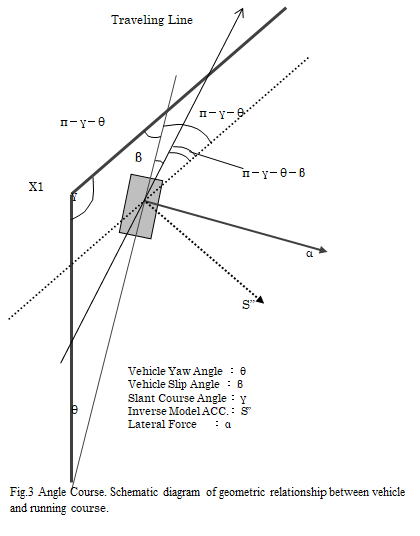
横加速度S”を
得る求心加速度αの関係は、αとS”の
なす角が π-γ-θ-β となり、

変形して、

符号をCarSimと
合わせるため、

S”発
生に必要なαは、
とすると、
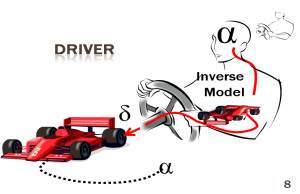
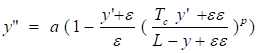
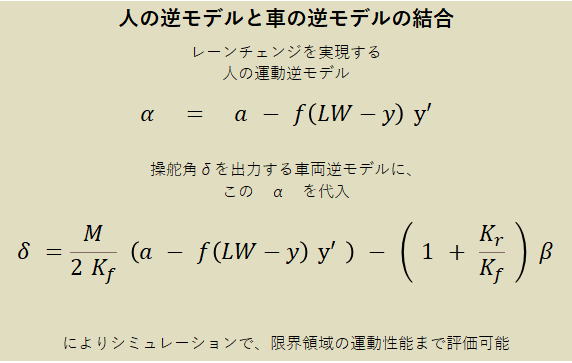
人の運動αは
 (7)
(7)
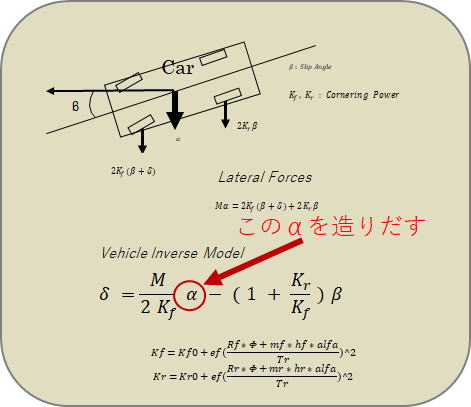
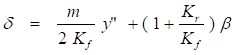
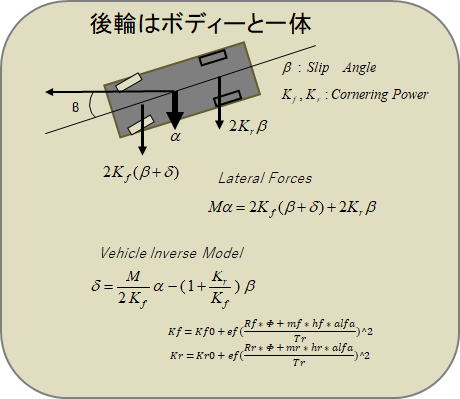
車両運動逆モデルにこのαを与
えた
が偏向のドライバモデル。
1-3
円旋回の人の逆モデル例(図
4)
ヨー
方向の運動をコントロールして進路を維持し てい
る場合の 公転運動の角速度ψ’を
見込む、人の感覚に沿った角加速度ψ”の
運動は
 (8)
(8)
ター
ゲットをψ’Tと
して、立ち上がりを緩やかにするよう Exp-1
を加えて、
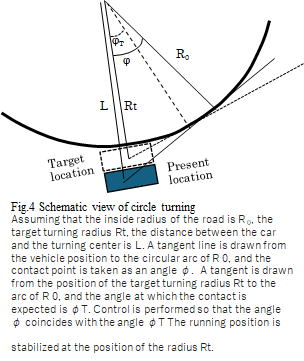
道路内側半径をR0、
車と旋回中心の距離をL、
旋回目標半径Rtと
すると、車両位置からR0の
円弧に接線を引いて、接点を見込む角度φが、
旋回目標半径Rtの
位置からR0の
円弧に接線を引いた場合の接点を見込む角度φTが
一致するようにコントロールして、走行位置 を半
径Rtの
位 置に安定させる。
 (9)
(9)
 (10)
(10)
公転のヨー角速度ψ’は
横加 速度αに対して α=vψ’(v:
速度)の関係があるので、このαを車両逆モ
デルに与えた
 (11)
(11)
が円旋回のドライバモデル。
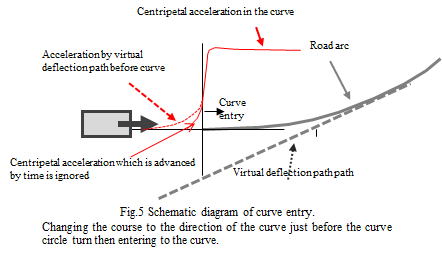
1-4
カーブ進入走行の人の 逆モ
デル例(図5)
実際の運転では、いきなり円旋回するのでは無く、カーブ直前でカーブの方向に進路変更して、カーブに入ってから円旋回するので、図5
に模式図で示すように、 1-2節の進 路変
更 +
1-3節の円旋回 のドライバモデルを直列につない
だ形になる。
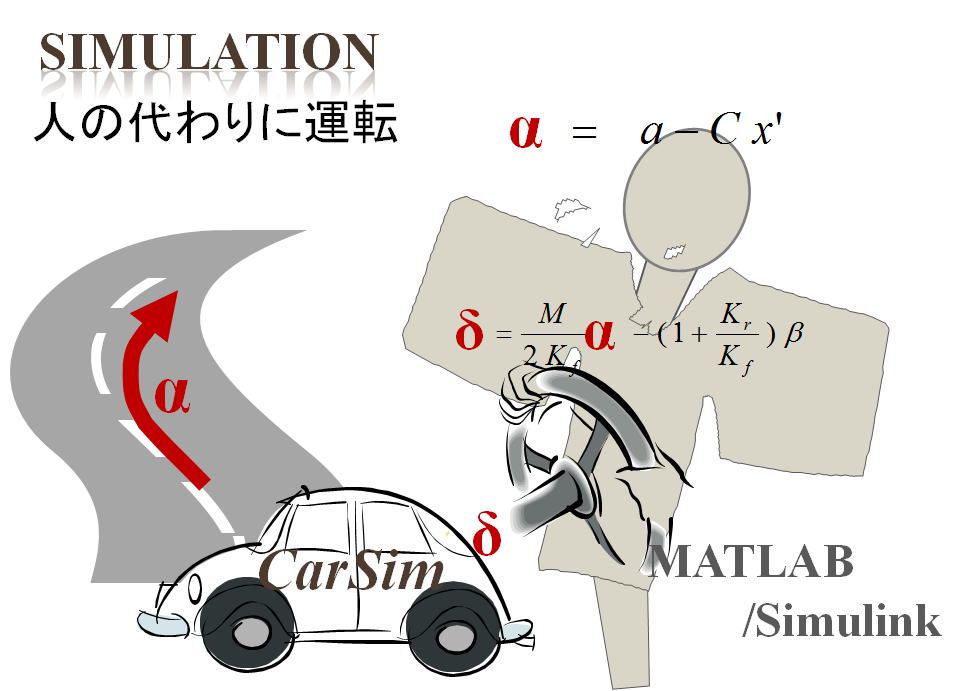
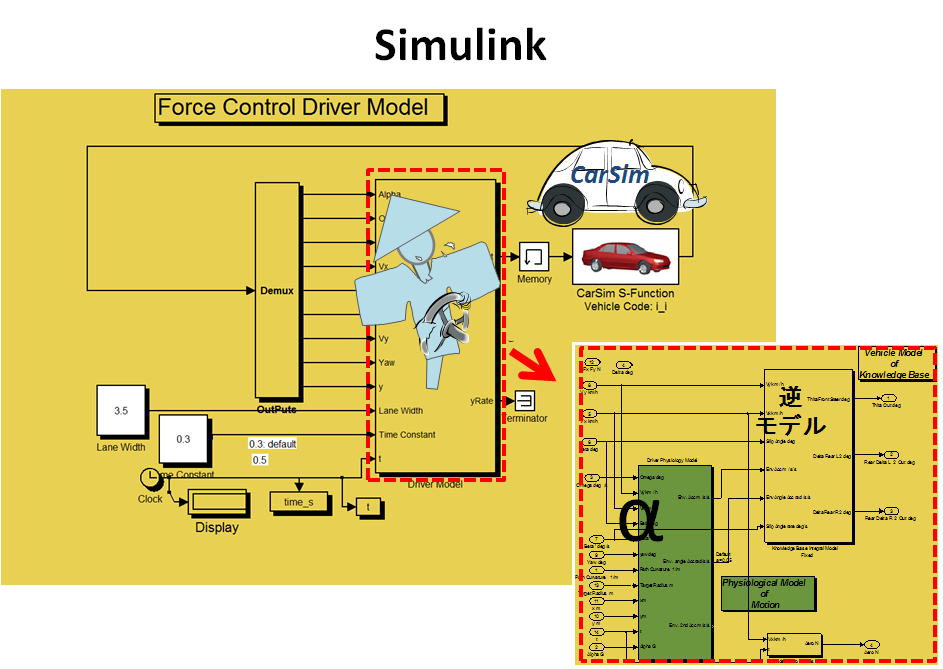
2. ド ライ バモデル
による運転シミュレーション
ドライバモデルはMATLAB/Simulink、
車両はCarSimを
使用。
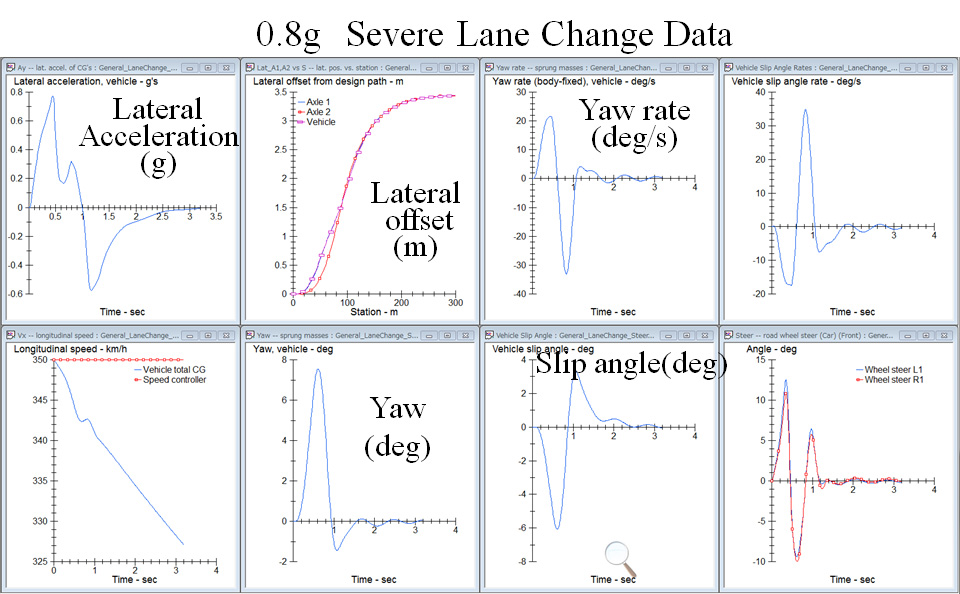
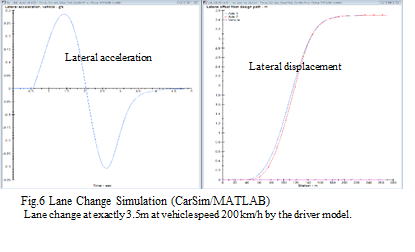
2-1 レーンチェンジ例(動画はページ先頭)
Lwidth=3.5
Tc=0.1
a=100
p=1.05 ε=0.25
正確に3.5mの
レーンチェンジを時速200km/h
で滑らかに実施しているのが図6から分 か る。
このページの最後にレーンチェンジの 詳し
いグラフ データあります。
2-2 左へ150度進路変更例
前方の150度偏向する道路に180km/hで
進入(図7)。

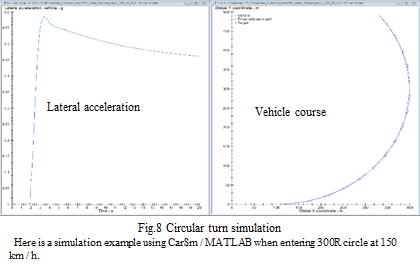
2-3 円旋回例
150km/h
でいきなり300R<定常円旋回 に
入った場合 のシミュレーション結果を図8
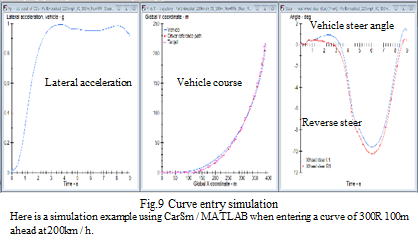
2-4 カーブ進入走行例(4ページに動画)
カーブ
進入前の100m助走 で、
カーブ方向に進路変更し、求心加速
度1Gでカーブに進入
2-5
4WS車
のレーンチェンジ (動
画はページ先頭)
同
相4WSの
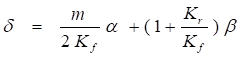
逆モデルは、平面運動の運動方程式と車 体の
回転の運 動方程式を連立して前輪舵角δf、
後輪舵角δrに
ついて解く。横滑り角β項
省略、ヨーレートω寄
与拡大修正。
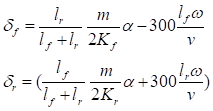
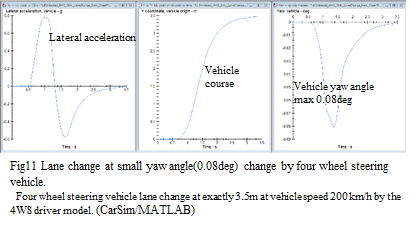
図11に
示すように車体を進行方向と平行のまま0.8g程
度のレーンチェンジを200km/h
で滑らかに実行し
ている。


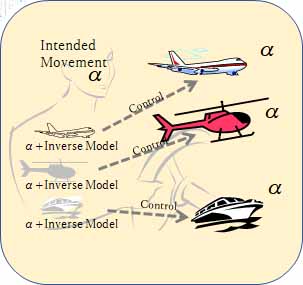 図に示す運動αが環境に沿って、ヒトの意思に沿った思うような運動を実現することに
なる。
図に示す運動αが環境に沿って、ヒトの意思に沿った思うような運動を実現することに
なる。