★ステアアシスト 運転アシスト
< id="SteerAssist">
Steer Assist
(ステアアシスト):ジャンプ元に戻る
タイヤの能力限界まで意図した旋回を、逆ハン状態も含めて実現する。
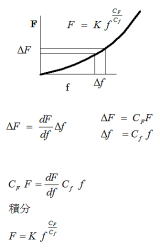
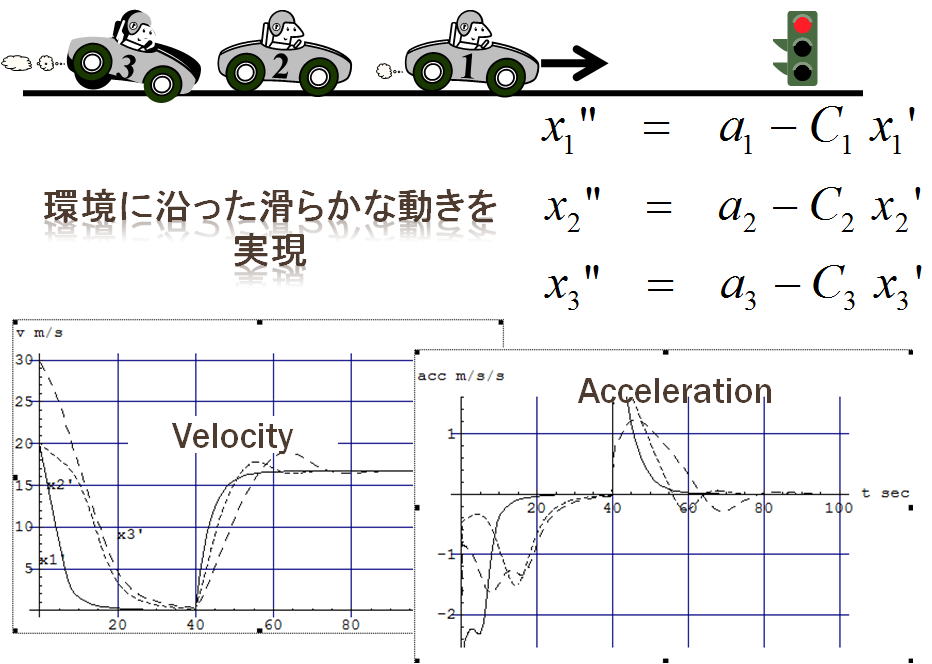
時々刻々の力のコントロールで積分時間を経て速度、変位が実現できる。
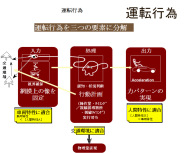
運動のコントロールは実現すべき目標(速度、変位が)に、先行した計画的な力のコントロールで目標運動状態を実現する。
すなわち運動加速度を計測すれば目指す運動が推定できる。
走行中の車の横加速度αを車両運動逆モデルに代入して、その運動状態αにふさわしい操舵角δをこの逆モデルで計算する。
もし現在の操舵角がこれと異なる場合は、その分を修正することになる。
機械的にゆっくり Fishhookターン(Jターン)を行なえるハンドル捌きの運転で速度を上げて走るとどうなるのか。
速度を上げるとスピンしてしまう場合の、操舵支援を行った場合の走行シミュレーション動画を右に示す。 緑が支援なし、白が支援車。
両車両は全く同じドライバによる全く同じステアリング操作でありながら、白のステアアシストされている車両では意図通りの滑らかな旋回を実現できているる。
|
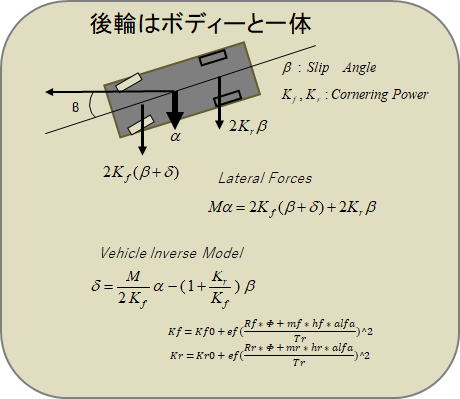
Kf=Kf0+εf ((Rf φ+mf hf α)/Tr )^2 Kr=Kr0+εf ((Rr φ+mr hr α)/Tr )^2
(δ:操舵角 、m,mf,mr:質量 Kf、Kr:前後タイヤのコーナリングパワ εf :荷重依存係数 α:横加速度 φ:ロール角 hf,hr:前後ロールセンタ高 Rf、Rr:前後ロール剛性 β:車体横滑り角(実車から得る))
車両は CarSim(Mechanical Simulation社)
運動逆モデルは MATLAB/Simulink で作成
|